
计算工业重量升降机
举重机器的发明基本上是为了让人类更容易地完成操纵重物的困难任务。轮子和滑轮的发明可能是主要发明之一,进一步帮助开发新的创新机器,以提升更重的物体。
正在进行的研究过程与这些机器的发展总是有一个共同的目标,使它们更好和更高效,技术上尽可能增加各自的机械优势。简而言之,理想情况下,一台机器应该能够操作更重的负载,以响应为目的应用的更小的努力。
在本文中,我们将讨论以下类型的机器:
- 简单轮轴
- 差动轮轴
- 韦斯顿差动滑轮组
- 蠕虫和虫子
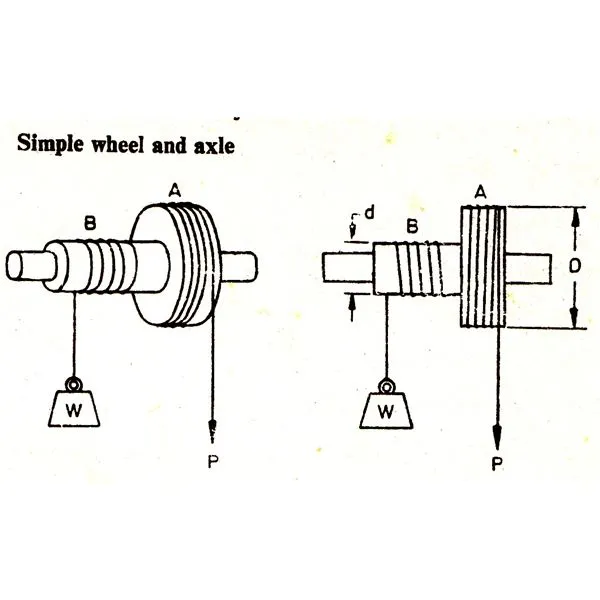
简单轮轴
该图示出了简单的轮和轴机构,具有车轮A和轴B集成到一个单元中。轮子和轴都缠绕在弦中,轴上的绳子的端部携带负载,而轮子上的绳子的自由端用于施加努力,以便升高与轴串附着的负载。
由于绕在A和B上的弦的方向是相反的,向下拉动轮弦将重物向上提。
让我们找到计算该机器的速度比和机械优势的表达式。
设D =车轮直径,
D =轴直径,
W =附在轴上的重量,
P =举起重物所付出的努力。
车轮和轴附着在一起意味着车轮的一个旋转也会产生轴的一个旋转。
车轮转动一圈所产生的位移= πD,
上述荷载在一圈内的位移= πd,
由于速度比VR =出力位移/重量位移= πD / πD = D/ D。
和机械优势MA =举起的重量/施加的力= W / P(标准方程),
因此,效率被提供为ɳ= MA / VR
差动轮轴

图中显示了一个标准差动轮和轴机构,其中负载轴由两部分B和C的不同直径组成。力弦缠绕在轮a上,另一根弦缠绕在轴B和轴C上,使弦通过挂在这些轴之间的滑轮。滑轮承载着要吊起的重量。绳子在B和C上以相反的方向缠绕确保C的缠绕方向与轮子A的弦方向相匹配这样在A上解开绳子也会在C上解开绳子,但是在B上缠绕。
让我们推出计算上述机器的VR,MA和ɳ的方法。
设D =车轮A的直径,
d1 = B轴直径,
D2 =轴C的直径,
W =重量被举起,
P =举重的应用努力。
一革命产生努力的位移=πd,
因此,绕B轴和C轴一圈的线长度分别为= πd1和πd2。
然而,由于绕组的方向不同,横跨轴B和C缠绕的弦的净长度将是=πd1-πd2。
因此,因此重量的位移将是=½(πd1 - πd2)
和VR =πd/½(πd1 - πd2)= 2d / d1-d2,
MA = W/P,ɳ= MA/VR
韦斯顿差动滑轮组

该图显示了一个有趣的机器,其中两部分A和B通过一个环链机构缠绕。上块A由两个滑轮P1和P2组成,后者直径稍小一些。因为它们是一个轮子的组成部分,当旋转时,它们沿着同一个方向移动。另一个向下悬挂的B块支撑着要举起的重物。一个没有末端的环形链通过巧妙的相互缠绕缠绕在两个块上,首先通过P1,然后通过滑轮B,最后通过P2,链的剩余无穷部分垂下来,可以用来提升重量。滑轮沟槽上有凸起物,以保持链条锁紧,并防止在操作时滑过滑轮。
让我们找到计算机器的相关参数的方法,如前所述:
设D = P1的直径,
d = P2'直径'
W =需要举起的重量,
P =移动重物的力。
由于所应用的努力P,链式穿过上针块的链条A =πd,这也等于重量向上覆盖的距离。
由于较小的滑轮也按比例转动,因此被它移位的链条= πd。
链长相对位移= πD - πD
上述缩短的链条长度是平均分配在两半的滑轮支持的负载。
因此,负载偏移=π/ 2(d-d)的距离,
也涵盖所施加的努力=Πd的距离
给出VR =πd/π/ 2(D -d)= 2d / d-d
MA和ɳ与之前讨论的相同。
蜗轮蜗杆

参照图,该机构包括在其中心的中心螺纹部分S的主轴组成,该中心被称为蜗杆,其齿轮被称为蜗轮轮。蜗杆采用固定的鼓和串机构,用于操作重量。大轮固定在蠕虫主轴的末端,该蜗杆轴承通过其凹槽携带绳索以便努力。
设,L =车轮半径,
r =负载鼓的半径,
w =负载的重量,
P =应用的努力,
t =蠕虫轮的牙齿号码。
考虑到蜗轮是单螺纹的,当a轮旋转一圈时,中心螺纹部分驱动蜗轮穿过单个齿。
因此,对于车轮的每一个旋转,努力覆盖的距离=2πl
负载滚筒在= 1 / t旋转中移动,
因此,权重所覆盖的距离= 2πr/T,
因此,速度比=力覆盖的距离/载荷覆盖的距离
=2πl/2πr/ t = lt / r
MA和效率公式与以前的机器讨论的相同。
所有图像,礼貌 - 书籍 - 应用力学和材料的力量,由R.S.Khurmi,
参考
书籍-应用力学和材料强度,R.S. Khurmi,
简单的机器,轮和轴 -RocketscienceTutors.com.
差动滑轮 -en.wikipedia.org.
